МНО́СТВА
набор, сукупнасць, збор якіх-н. аб’ектаў (элементаў), што маюць агульную для ўсіх характарыстычную ўласцівасць. Каб
А.А.Гусак.
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
МНО́СТВА
набор, сукупнасць, збор якіх-н. аб’ектаў (элементаў), што маюць агульную для ўсіх характарыстычную ўласцівасць. Каб
А.А.Гусак.
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
ПАСЛЯДО́ЎНАСЦЬ
сукупнасць аб’ектаў адвольнай прыроды, занумараваных натуральнымі лікамі 1, 2, 3, ..., n, ..., . Запісваецца ў выглядзе {x1, x2..., xn...} ці скарочана {xn}. Элементы x1, x2, ...
П. лічаць зададзенай аналітычна, калі зададзена формула яе агульнага члена,
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
МЕ́ТРЫКА
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
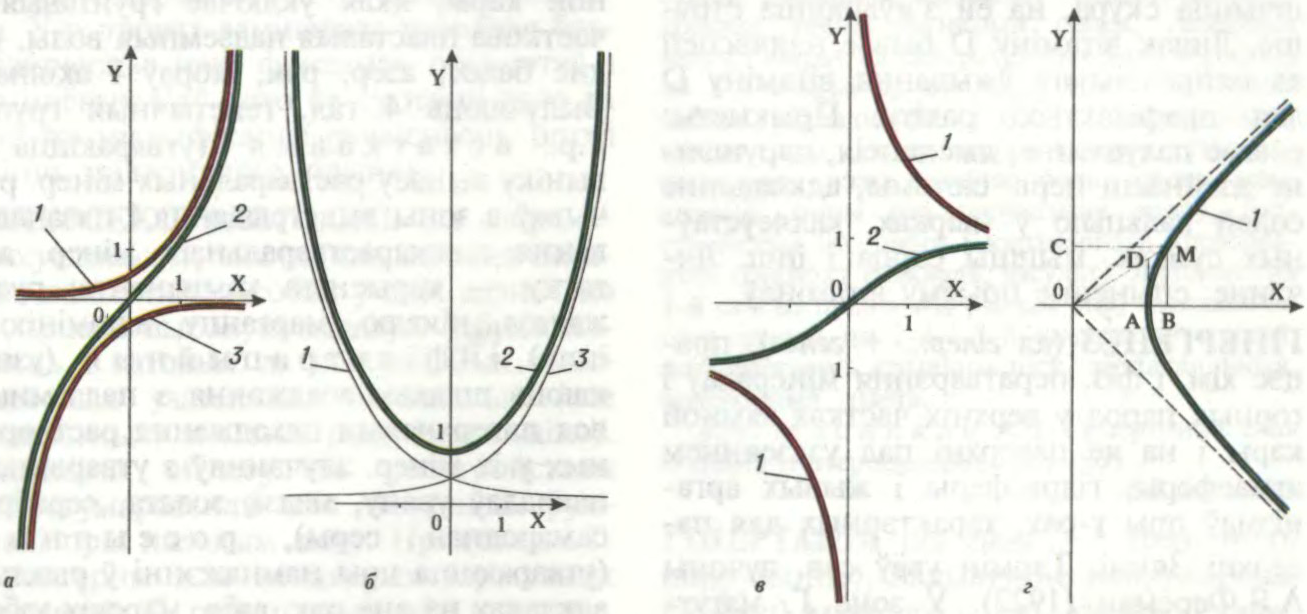
ГІПЕРБАЛІ́ЧНЫЯ ФУ́НКЦЫІ,
функцыі, якія вызначаюцца формуламі: shx = (ex − e−x)/2 (гіпербалічны сінус), chx = (ex + e−x)/2 (гіпербалічны косінус) і
Гіпербалічныя функцыі звязаны паміж сабой суадносінамі, падобнымі на суадносіны паміж трыганаметрычнымі функцыямі: ch2x − sh2x = 1, thx = shx/chx
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
ЗВЫЧА́ЙНЫЯ ДЫФЕРЭНЦЫЯ́ЛЬНЫЯ ЎРАЎНЕ́ННІ,
ураўненні адносна функцыі адной пераменнай, якая ўваходзіць у гэта ўраўненне разам са сваімі вытворнымі да некаторага парадку ўключна. Найбольшы парадак вытворнай
Калі З.д.ў. запісана ў форме
(, , ′, ..., )
, то кажуць, што гэта ўраўненне n-га парадку ў нармальнай форме. Згодна з тэарэмай існавання і адзінасці ў такога ўраўнення існуе і прычым толькі адно рашэнне з пачатковымі ўмовамі
,
...,
, дзе , , , ..., — адвольны пункт вобласці
у якой (, , ..., ) — функцыя, неперарыўная разам са сваімі вытворнымі , , ..., . Гэта азначае, што пачатковыя ўмовы цалкам вызначаюць усё мінулае і будучае той рэальнай сістэмы, якая апісваецца гэтым ураўненнем. Пры дапамозе З.д.ў. або іх сістэм мадэлююць дэтэрмінаваныя рэальныя сістэмы (працэсы). Пры гэтым стан сістэмы ў кожны момант часу павінен апісвацца канечным мноствам параметраў , ..., . Тады, каб запісаць такаю мадэль, дастаткова ў мностве станаў сістэмы, якую мадэлююць,
Літ.:
Еругин Н.П. Книга для чтения по общему курсу дифференциальных уравнений. 3 изд.
Петровский И.Г. Лекции по теории обыкновенных дифференциальных уравнений. 7 изд.
У.Л.Міроненка.
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
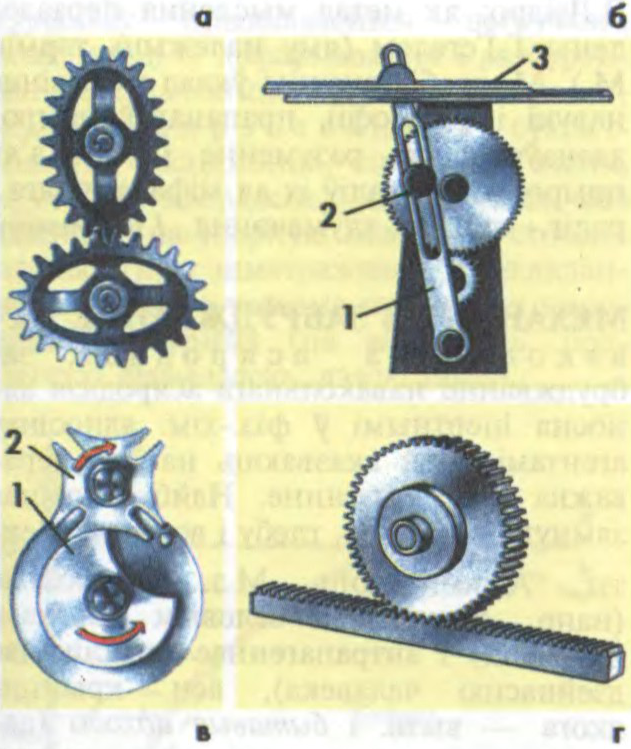
МЕХАНІ́ЗМ (ад
1) сістэма злучаных паміж сабой цел (звёнаў) для пераўтварэння (перадачы, узнаўлення) руху аднаго або некалькіх цел у патрэбныя рухі
3) Сукупнасць і паслядоўнасць станаў, стадый, працэсаў, з якіх складаецца якая-н.
Літ.:
Кожевников С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. 3 изд.
Артоболевский И.И. Механизмы в современной технике
Кожевников С.Н. Основания структурного синтеза механизмов. Киев, 1979.
У.М.Сацута.
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)