ри́мский ры́мскі;
ри́мское пра́во юр. ры́мскае пра́ва;
ри́мская це́рковь ры́мская царква́;
ри́мские ци́фры ры́мскія лі́чбы;
ри́мский Па́па церк. Ры́мскі Па́па.
Руска-беларускі слоўнік НАН Беларусі, 10-е выданне (2012, актуальны правапіс)
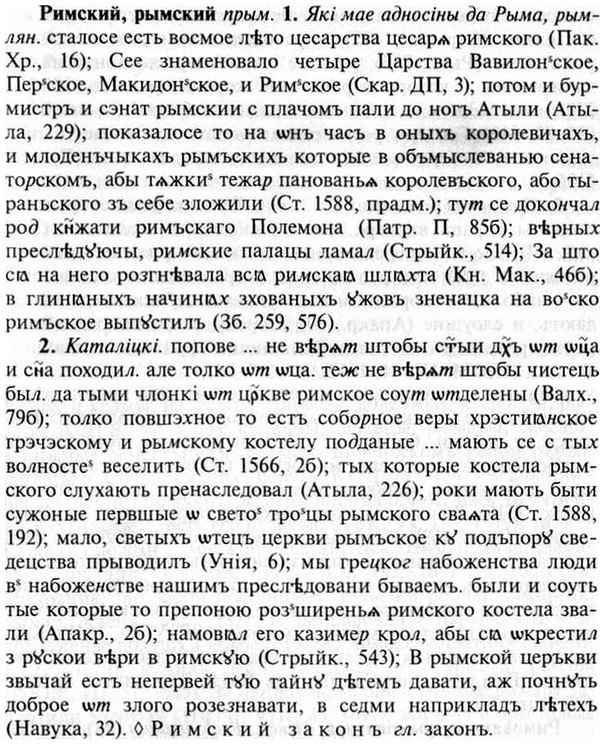
римский
Том: 30, старонка: 109.
Гістарычны слоўнік беларускай мовы (1982–2017)
Римский-Корсаков А. В. 7/310; 11/427
Беларуская Савецкая Энцыклапедыя (1969—76, паказальнікі; правапіс да 2008 г., часткова)
па́паII церк. па́па, -пы м.;
Па́па Ри́мский Па́па Ры́мскі.
Руска-беларускі слоўнік НАН Беларусі, 10-е выданне (2012, актуальны правапіс)
ры́мскі ри́мский;
○ ~кае пра́ва — ри́мское пра́во;
~кія лі́чбы — ри́мские ци́фры
Беларуска-рускі слоўнік, 4-е выданне (2012, актуальны правапіс)
па́па м.
1. церк. па́па;
П. Ры́мскі — Па́па Ри́мский;
2. (детское арго) хлеб
Беларуска-рускі слоўнік, 4-е выданне (2012, актуальны правапіс)
ГІ́БКІ ВЫТВО́РЧЫ МО́ДУЛЬ (ГВМ),
структурны элемент гібкай аўтаматызаванай вытворчасці, які функцыянуе ў яе контуры аператыўна-тэхнал. кіравання. Бываюць апрацоўчыя і зборачныя. Апрацоўчыя ГВМ уключаюць станок з лікавым праграмным кіраваннем і прыстасаванне аўтам. загрузкі-выгрузкі. У зборачныя ГВМ уваходзяць прамысловы робат для маніпуліравання дэталямі пры зборцы, зборачная галоўка для злучэння дэталей у сістэму і блок лікавага праграмнага кіравання, часам і транспартна-назапашвальная сістэма. ГВМ для зборкі буйных вырабаў складаецца са зборачнага паста, падлогавых і падвесных робатаў для выгрузкі дэталей і інш. ГВМ уласціва хуткая пераналаджвальнасць і універсальнасць.
Літ.:
Сольницев Р.И., Кононюк А.Е., Кулаков Ф.М. Автоматизация проектирования ГПС. Л., 1990;
Римский Г.В. Теория систем автоматизированного проектирования: Интеллектуальные САПР на базе вычисл. комплексов и сетей. Мн., 1994.
Г.В.Рымскі.
т. 5, с. 214
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
ГІ́БКАЯ АЎТАМАТЫЗАВА́НАЯ ВЫТВО́РЧАСЦЬ (ГАВ),
вытворчы комплекс для выпуску аднароднай па асноўных канструкцыйных і тэхнал. параметрах прадукцыі, здольны безынерцыйна пераходзіць на выпуск новых вырабаў. Вызначаецца комплекснай аўтаматызацыяй тэхнал. аперацый, праграмнай пераналадкай абсталявання, аператыўнай канструктарска-тэхнал. і арганізацыйна-эканам. падрыхтоўкай вытв-сці, аўтаматызацыяй кіравання вытв.-тэхнал. працэсамі і аператыўнага планавання, групавой тэхналогіяй апрацоўкі дэталей.
У ГАВ вылучаюцца і функцыянуюць пад адзіным кіраваннем: гібкія вытворчыя модулі, гібкія аўтаматычныя лініі, гібкія аўтаматызаваныя ўчасткі і цэхі, заводы-аўтаматы. ГАВ ахопліваецца двума контурамі аператыўнага кіравання, якія функцыянуюць сінхронна: арганізацыйна-аператыўнага і аператыўна-тэхнал. кіравання. Патокі загатовак, дэталей, вырабаў замыкаюцца паміж аўтаматызаванымі складамі, апрацоўчымі комплексамі, зборачным комплексам, пастом фінішнага кантролю. Модулі ГАВ функцыянуюць ва ўзаемадзеянні з аўтаматызаванымі сістэмамі праектавання, тэхнал. падрыхтоўкі вытв-сці, кіравання тэхнал. працэсамі і кіравання вытв-сцю. Гл. таксама Аўтаматызацыя вытворчасці, Аўтаматызаваная сістэма кіравання.
Літ.:
Лищинский Л.Ю. Структурнай и параметрический синтез гибких производственных систем. М., 1990;
Римский Г.В. Теория систем автоматизированного проектирования: Интеллектуальные САПР на базе вычисл. комплексов и сетей. Мн., 1994.
Г.В.Рымскі.
т. 5, с. 214
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
МАДУЛЯ́ЦЫЯ (ад лац. modulatio мернасць) у музыцы, змена танальнасці з перамяшчэннем танальнага цэнтра — тонікі. Паняцце М. найб. часта звязваюць з гукавышыннымі адносінамі. Асн. віды М. — танальная (змена вышыннага становішча тонікі) і ладавая (змена нахілення). Сярод разнавіднасцей танальнай М. найб. пашырана функцыянальная М., калі пераход у новую танальнасць адбываецца праз пераасэнсаванне ступеневага значэння прамежкавага (агульнага) акорда, выбар якога рэгулюецца гарманічнай роднасцю танальнасцей. Новая танальнасць устанаўліваецца характэрным для яе гарманічным зваротам, які ўключае мадулюючы акорд з альтэрацыяй, адпаведнай новай танальнасці. У залежнасці ад месца ў форме і ступені замацавання новай тонікі вылучаюць М. дасканалую (з канчатковым ці адносным замацаваннем новай танальнасці) і недасканалую (замацоўваецца менш устойліва). Да недасканалай М. адносяцца адхіленне (са зваротам у асн. танальнасць) і праходная М. (з далейшым мадуляцыйным рухам). Спецыфічную выразнасць мае энгарманічная М., звязаная з лаканізмам мадуляцыйнага моманту і раптоўнасцю пераключэння ў новую танальнасць; пераход пры ёй адбываецца за кошт энгарманічнага пераасэнсавання структуры агульнага акорда. Для мелодыка-гарманічнай М. характэрна сувязь танальнасцей з дапамогай плаўнага голасавядзення без агульнага акорда, для меладычнай М. — праз аднагалосую звязку. Увядзенне новай танальнасці без падрыхтоўкі, непасрэдным зацвярджэннем тонікі — якасць М.-супастаўлення. М. можна лічыць і ўсякую змену структуры сродкаў муз. выразнасці, у т. л. формы, жанру, фактуры, метра і інш. М. — важны формаўтваральны сродак, які ўплывае на дынамічныя працэсы і цэласнасць формы, узбагачае маляўніча-выразны бок гармоніі.
Літ.:
Римский-Корсаков Н.А. Практический учебник гармонии (1886, 1893) // Полн. собр. соч. М., 1960. Т. 4;
Бершадская Т.С. Лекции по гармонии. 2 изд. Л., 1985.
Т.С.Ляшчэня.
т. 9, с. 492
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)
АЎТАМАТЫ́ЧНАГА КІРАВА́ННЯ ТЭО́РЫЯ,
раздзел кібернетыкі тэхнічнай, які вывучае прынцыпы пабудовы сістэм аўтам. кіравання (САК) і заканамернасці працэсаў, што ў іх працякаюць. Даследаванні праводзяцца на дынамічных (фіз. і матэм.) мадэлях рэальных сістэм з улікам умоў работы, прызначэння і канструкцыйных асаблівасцяў аб’ектаў і аўтам. прыстасаванняў.
Спачатку аўтаматычнага кіравання тэорыя развівалася як тэорыя аўтам. рэгулявання. На аснове вывучэння ўзаемадзеяння кіроўных прыстасаванняў і тэхн. аб’ектаў рознай прыроды выяўлена агульнасць працэсаў кіравання. Асн. задача аўтаматычнага кіравання тэорыі — распрацоўка метадаў аналізу і сінтэзу САК, з дапамогай якой руху (паводзінам) пэўнага аб’екта можна надаваць папярэдне зададзеныя ўласцівасці. Пры фіз. мадэляванні неабходна геам. (макеты збудаванняў, размеркаванне абсталявання і інш.) і фіз. (тоеснасць законаў руху, функцыянавання і інш.) падабенства. Пры матэм. мадэляванні абавязкова аднолькавасць матэм. фармалізму, вынікаў матэм. суадносін (разлікаў па формулах, алгарытмах і інш.) і рэальных працэсаў. Матэм. мадэль дынамікі аб’екта, у якой працэсы кіравання апісваюцца сістэмай звычайных дыферэнцыяльных ураўненняў або ўраўненняў у частковых вытворных, пры пераходзе ад ураўненняў да перадатачных функцый увасабляецца ў структурную схему з тыповых звенняў. Пры пабудове складаных сістэм кіравання акрамя тэарэт. метадаў выкарыстоўваецца мадэляванне на базе ЭВМ (у т. л. аналогавых), на якіх узнаўляюцца ўраўненні, што апісваюць сістэму кіравання ў цэлым, і па выніках разлікаў высвятляецца структура кіроўнага прыстасавання.
На Беларусі з канца 1950-х г. у АН, БДУ, Бел. політэхн. акадэміі, Бел. дзярж. ун-це інфарматыкі і радыёэлектронікі развіваецца тэорыя аўтам. рэгулявання электрапрыводаў, самапрыстасавальных аптымальных сістэм, сістэм з пераменнай структурай і інш.
Літ.:
Теория автоматического регулирования. Кн. 1—3. М., 1967—69;
Римский Г.В. Основы общей теории корневых траекторий систем автоматического управления. Мн., 1972;
Панасюк А.И., Панасюк В.И., Асимптотическая магистральная оптимизация управляемых систем. Мн., 1986.
Г.В.Рымскі.
т. 2, с. 115
Беларуская Энцыклапедыя (1996—2004, правапіс да 2008 г., часткова)